Exploring autonomy...
...for multilegged robotics locomotion in complex environments
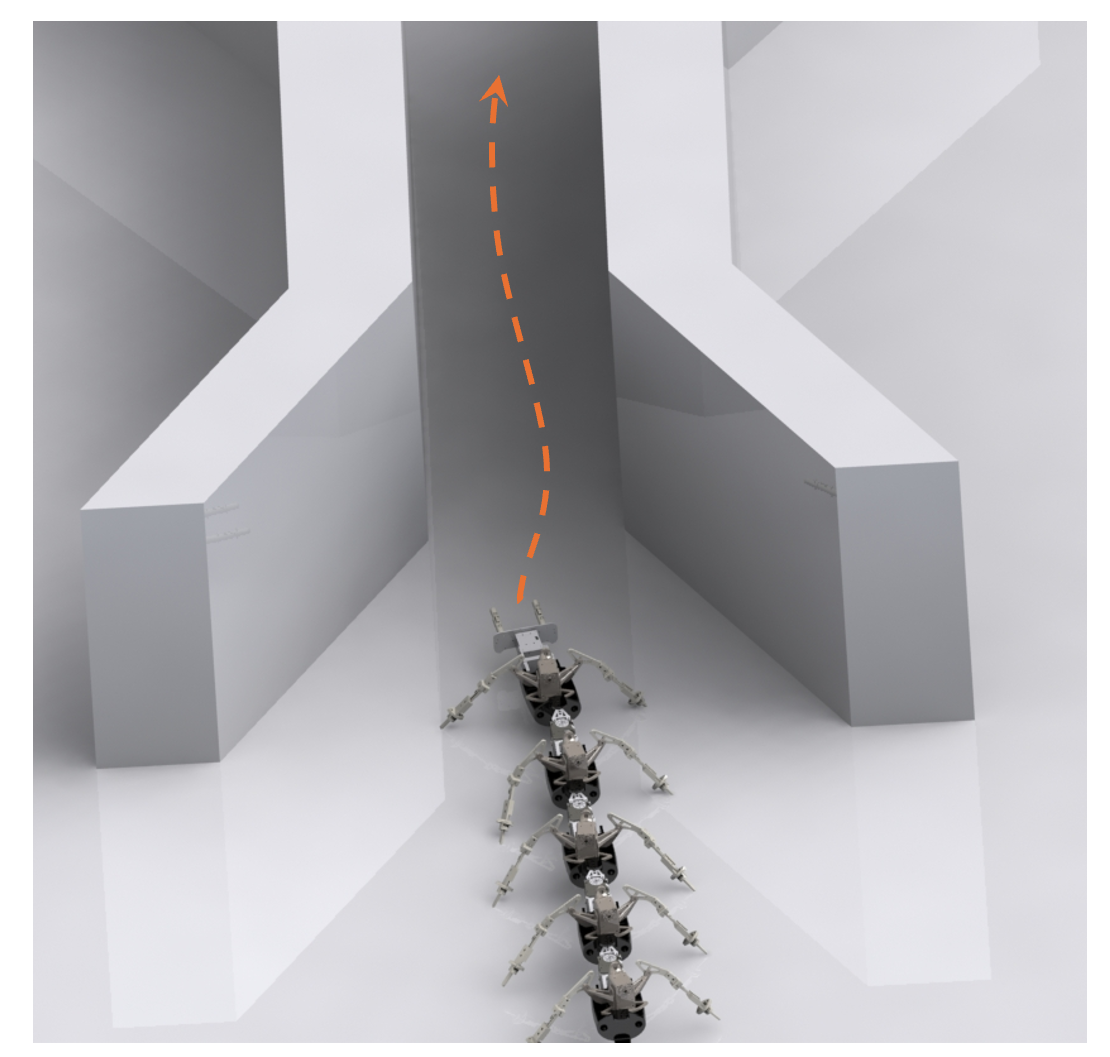
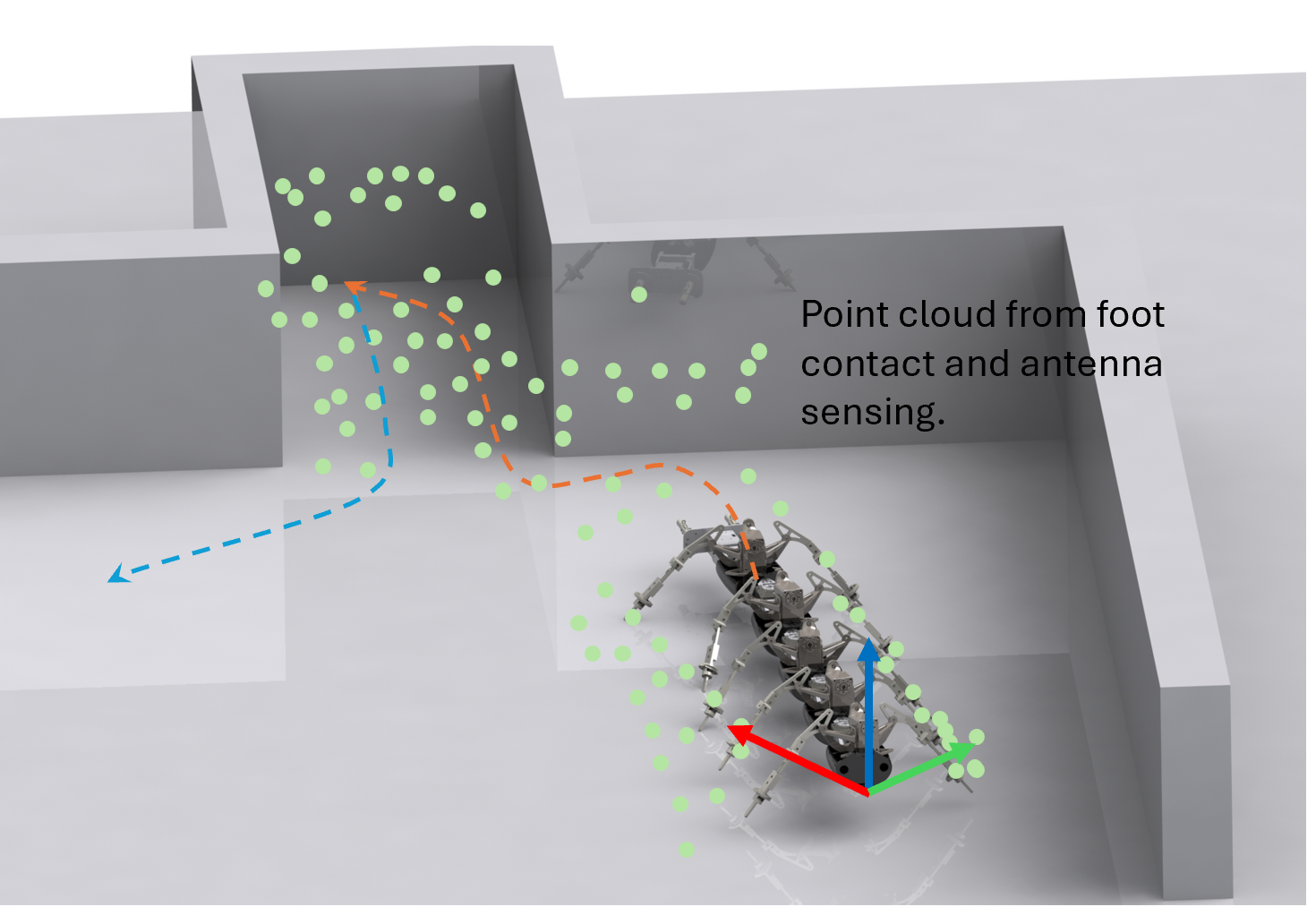
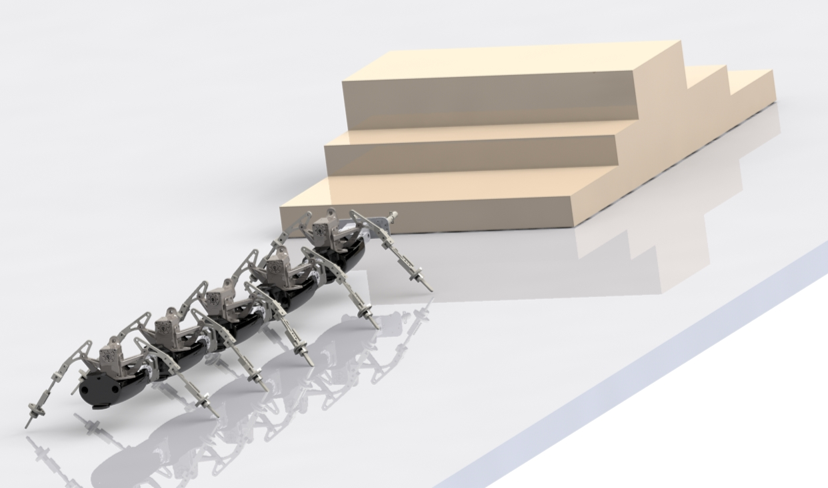
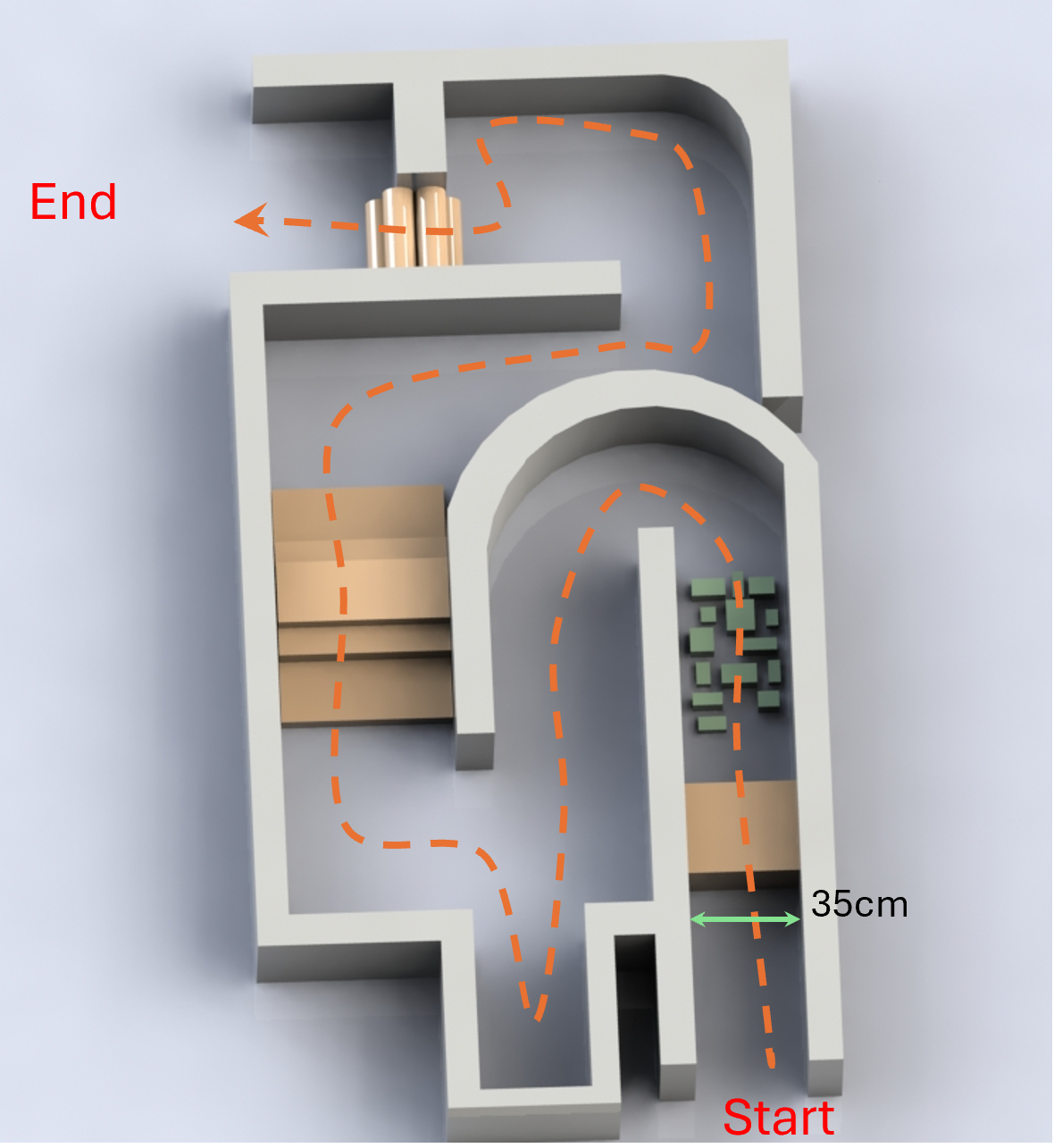
While our lab has mostly focused within the realm of mechanical intelligence, in the past couple of years we have started to look more into the power of computational intelligence, specifically when applied to centipede-inspired robotics. This project I am currently a part of under the supervision of PhD student Juntao He is the result of a collaboration between my professor Daniel Goldman and professor Sehoon Ha, and focuses on enhancing the autonomous capabilities of our centipede robots using short-term memory from tactile sensing, both feet and antenna.
Because the project is led by Juntao, who was working an internship during summer, my contribution in the project so far has been quite limited, and it consisted in leading two undergraduate students to respectively design and build the first prototypes of the new robotic antenna and to implement the robotics simulation in Mujoco.
While I am away this Fall, I am very excited to continue my contribution in the project during the Spring in order to learn more about autonomy and planning.