Using Tactile Sensing to...
...enhance vertical obstacle negotiation for multilegged robots
Most robotics efforts nowadays go towards the development of complex algorithms for enhancing locomotion on complex terrains, relying on the so-called computational intelligence. However, such algorithms while currently successfully revolutionizing the paradigms of robotics locomotion, are highly dependent on vision capabilities, which are often not available in cluttered, dark, narrow environments like search-and-rescue environments are.
At the CRAB Lab, while recognizing the extreme value of computational intelligence in robotics, we focus on studying the physics of locomotion, and as a direct consequence, on providing simpler alternatives to successfully perform similar tasks even just using open-loop systems or at least simple feedback controllers and algorithms.
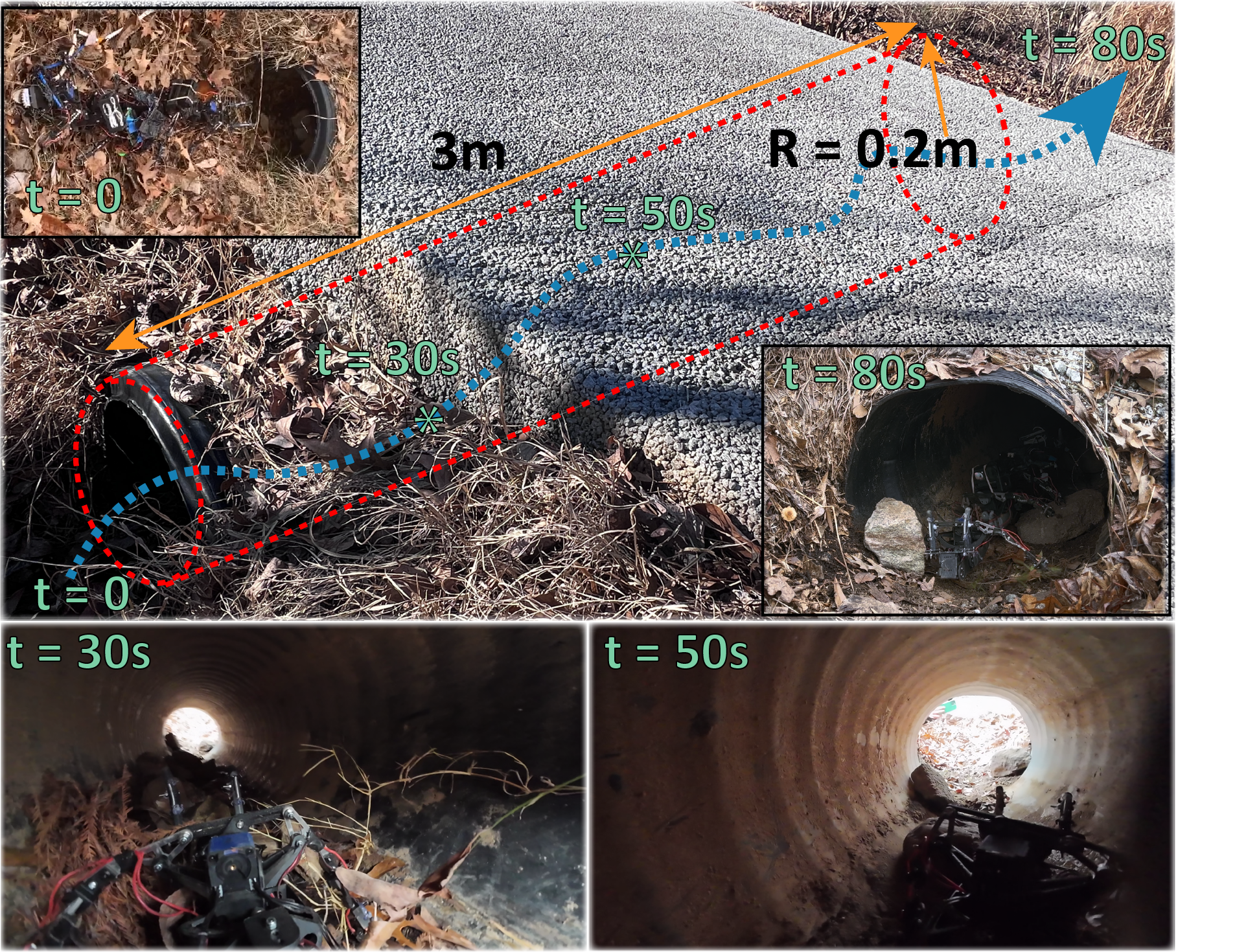
In this project, we aimed to develop a tactile framework to perform obstacle climbing tasks on our multilegged robots, which compared to vision-based approaches, provides advantages such as lower computational requirements and insensitivity to lighting conditions, despite its limited detection range.
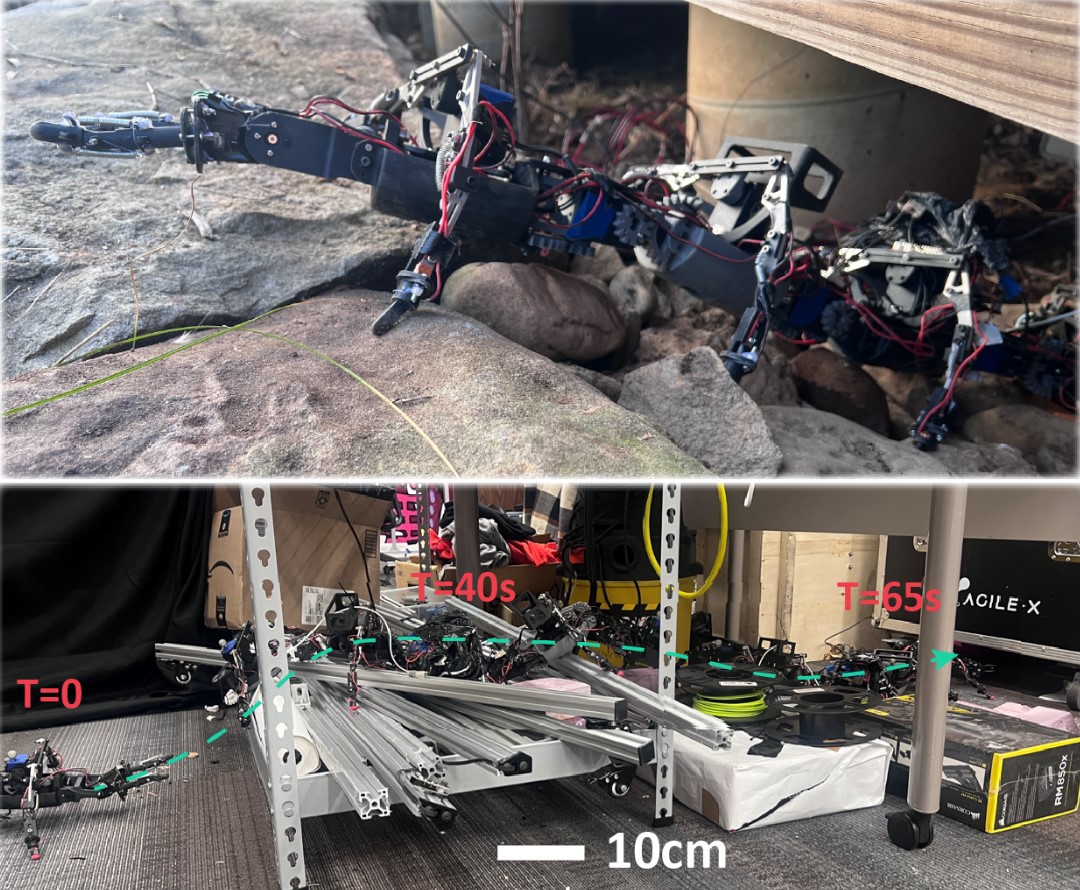
By definition, centipedes are long and narrow. The first feature, combined with their spatial redundancy (multiple legs) allows for great stability on most terrains without needing complex brains. The second feature allows them to reach environments that most other legged robot cannot.
In this paper, we build on this already advantageous mechanical intelligence through the addition of low-bandwidth tactile sensing, a compliant antenna plus binary foot contacts, and a simple feedback controller that is able to estimate the geometry of an obstacle, modulate just two vertical joints to “raise, hook, and drag” the body over it and successfully climb it.
Results show how our new controller allows the robot to climb up to 5 times its own height.
The work presented above rapresents only the first step of a larger series. Future work, in collaboration with the PhD student Juntao He, will involve the design of improved tactile sensing mechanisms, the creation of a learning-based controller, and SLAM applications.